雷达技术作为一种先进的测量和检测手段,广泛应用于交通管理、气象监测、无人驾驶等领域。通过雷达,可以实现对目标物体的距离和速度测量,以及获取三维图像数据。MATLAB作为一种强大的科学计算软件,能够有效处理雷达数据,并提供直观的可视化效果。本文将对如何使用MATLAB进行雷达测距、测速及生成三维图像进行探讨。
雷达测距原理
雷达测速原理
雷达测速主要依靠多普勒效应。其原理是当雷达波照射到移动物体时,反射回来的波频率会发生变化,频率的变化量与物体的速度成正比。通过测量频率的变化,结合已知的波速,可以计算出目标的速度。测速公式为:速度 = (接收频率 - 发射频率) x 波速 / (2 x 发射频率)。
MATLAB在雷达数据处理中的应用
MATLAB为雷达数据处理提供了丰富的工具和函数库。利用MATLAB,我们可以轻松实现雷达信号的读取、处理和分析。一些常用的MATLAB函数如fft、ifft可以帮助我们进行频域分析,使用plot函数可以实现数据的可视化。此外,MATLAB的图形处理能力也使得生成三维图像成为可能。
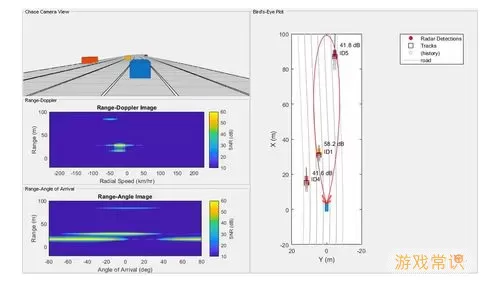
生成雷达三维图像
在MATLAB中生成雷达三维图像,首先需要收集并处理雷达数据,然后将其转化为可视化格式。常用的步骤包括:提取数据特征、构建三维坐标系和绘制三维图形。可以使用surf或mesh等绘图函数,结合雷达的测距和测速数据,展示目标物体的三维位置及其运动状态。
示例代码
以下是一个简单的MATLAB示例代码,用于演示如何生成雷达三维图像:
% 参数设置 t = 0:0.01:10; % 时间参数 x = sin(t); % X轴数据 y = cos(t); % Y轴数据 z = t; % Z轴数据 (时间作为高度) % 三维图像绘制 figure; plot3(x, y, z); title(雷达三维图像); xlabel(X轴); ylabel(Y轴); zlabel(高度); grid on;
结论
通过本文的介绍,我们可以看到雷达测距、测速的基本原理及其在MATLAB中的实现方法。MATLAB不仅提供了强大的数据处理能力,也为雷达技术在实际应用中的可视化分析提供了便利。未来,随着雷达技术的不断发展,MATLAB将在更加多样化的应用场景中发挥重要作用。
雷达测距测速三维图像MATLAB[共1款]
-
 新小森生活安卓版最新166.3M | 策略经营2024-08-08
新小森生活安卓版最新166.3M | 策略经营2024-08-08 -
 我小兵贼强游戏安卓版135.2M | 战略塔防2024-08-08
我小兵贼强游戏安卓版135.2M | 战略塔防2024-08-08 -
 Wind Hero下载手机版105.9M | 动作游戏2024-08-08
Wind Hero下载手机版105.9M | 动作游戏2024-08-08 -
 问山海手游免费版1.56G | 角色扮演2024-08-08
问山海手游免费版1.56G | 角色扮演2024-08-08 -
 Iron Blade下载官网版27.5M | 动作游戏2024-08-08
Iron Blade下载官网版27.5M | 动作游戏2024-08-08 -
 Flip Diving最新版139.4M | 体育运动2024-08-08
Flip Diving最新版139.4M | 体育运动2024-08-08
- 推荐阅读阅读排行
-
-
 好奇说绘本客服电话08-08发布
好奇说绘本客服电话08-08发布 -
 丛林生存者是什么意思08-08发布
丛林生存者是什么意思08-08发布 -
 华为学生模式密码是几位数的08-08发布
华为学生模式密码是几位数的08-08发布 -
 烈焰传奇转1能去哪些地方08-08发布
烈焰传奇转1能去哪些地方08-08发布 -
 欢迎来到梦乐园黑皮白毛08-08发布
欢迎来到梦乐园黑皮白毛08-08发布
-




- 推荐下载下载排行
-
-